Ontwikkeling ATB
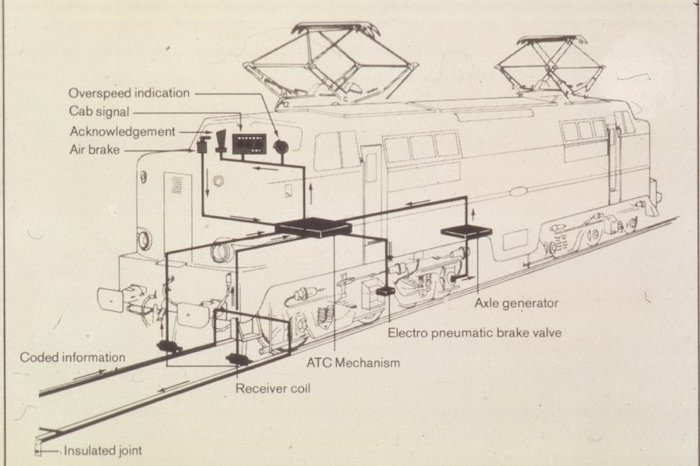
Het originele blokschema voor ATB EG treinapparatuur. Passend een van oorsprong Amerikaanse lok met de van oorsprong Amerikaanse ATB
Onderstaande tekst is grotendeels gebaseerd op de Railned Spoorwegveiligheid notitie “ATB Problematiek” uit 2001 en beslaat de periode van ruwweg 1960 tot 2001. Uit de samenvatting:
“Na 40 jaar staat het beleid inzake ATB opnieuw voor principiële keuzes. Naast systemen voor ATB Eerste en Nieuwe Generatie is het Europese ERTMS/ETCS naar voren gekomen. Enkele los van elkaar staande grote projecten behelzen keuzes over ATB-systemen. De gevolgen van en samenhangen tussen deze keuzes worden in deze notitie in kaart gebracht.“
De beschrijving van ERTMS en de keuze scenario’s uit de nota zijn hier weggelaten omdat ze buiten de context van dit relaas vallen en door de feiten achterhaald zijn. De figuren zijn door mij toegevoegd.
1 Historie ATB-systemen
Bij de in jaren '50 gestarte modernisering van de mechanische- en elektromechanische beveiliging met armseinen verkeerde men in de veronderstelling dat door de introductie van een nieuw, op lichtseinen gebaseerd snelheidsseinstelsel, de zichtbaarheid van de in dit systeem toegepaste seinen dermate goed was dat machinisten deze seinen niet zouden kunnen "missen". In 1962 werd het echter duidelijk dat deze aanname niet juist was. Op het met moderne beveiliging uitgeruste spoorwegknooppunt Harmelen vond een botsing tussen twee reizigerstreinen plaats waarbij 92 mensen het leven lieten en 151 gewonden vielen. Het was verreweg het ernstigste ongeval in de geschiedenis van de Nederlandse Spoorwegen. Dit ongeval leidde tot de invoering van een systeem voor Automatische TreinBeïnvloeding (ATB). Dit systeem kan zo nodig corrigerend optreden in het geval dat de machinist niet voldoet aan de remopdrachten die worden gegeven door de seinen.
1.1 Hoe is systeemkeuze tot stand gekomen?
Begin jaren '60 waren er diverse spoorwegmaatschappijen die ervaring hadden met treinbeïnvloedingssystemen. Voorbeelden hiervan zijn Indusi (Duitsland) en Crocodile (België). Deze systemen kenmerken zich door zeer beperkte functionaliteit; bij de passage van een sein wordt kortstondig de machinist geattendeerd op de opdracht die het sein geeft. Bij het ontbreken van informatie door bijvoorbeeld een technisch defect, blijft de opdracht achterwege.
Ook NS experimenteerde in de jaren '50 met een treinbeïnvloedingssysteem.
De kosten van invoering van een dergelijk systeem waren ook toen al aanzienlijk. Dit heeft het besluit tot invoering meermalen uitgesteld. Het volgende citaat illustreert hoe de eerste jaren van invoering van ATB verliepen. Wat opvalt zijn de opmerkelijke overeenkomsten met de huidige situatie: discussies over systeemkeuzes, optimistische implementatie scenario’s, niet uit ontwikkelde apparatuur, etcetera.
"Toen NS na het ongeval bij Harmelen in 1962 opdracht kreeg om vóór 1 januari 1964 een begin te maken met de invoering van een systeem van automatische treinbeïnvloeding stond het allereerst voor de keuze tussen een continu systeem en een puntbeïnvloedingssysteem. Als sinds 1953 waren op bescheiden schaal proeven genomen met het continu systeem van de Amerikaanse General Railway Signal Company. Het systeem werd kortweg ATB genoemd. Om tot een onder de Nederlandse omstandigheden bruikbaar en hanteerbaar systeem te komen moest nog veel ontwikkelwerk worden gedaan. Desalniettemin was NS van meet af aan geheel overtuigd van haar keuze. NS meende dat ultimo 1974 de apparatuur op het gehele net kon zijn ingebouwd.
Het directoraat-generaal van het Verkeer vond de ideeën van NS weinig realistisch. Het meende dat niet over de invoering van het systeem van GRS kon worden beslist zolang niet was vastgesteld dat het daadwerkelijk aan eisen voldeed. Bovendien vond het DG de geschatte termijn van invoering weinig realistisch. ATB kon alleen worden ingebouwd op baanvakken met gemoderniseerde beveiliging. Om de termijn van 1974 te halen moest het tempo van modernisering aanzienlijk worden opgevoerd. De invoering zou niet tien maar 25 jaar duren. Het DG had zelf een voorkeur voor het Indusi-systeem. Dit had zich in Duitsland al als betrouwbaar bewezen en zou in vier à vijf jaar in te bouwen zijn over het gehele net. De NS vond de Indusi echter een verouderd systeem dat geen verdere ontwikkeling of aanvulling mogelijk maakte. Met de veelheid aan argumenten bleef NS aan het systeem van GRS vasthouden.
Het DG was met zijn beperkte technische expertise niet tegen NS opgewassen. Begin 1963 hakte de staatssecretaris van Verkeer en Waterstaat de knoop door: NS kreeg toestemming om met de ATB aan de gang te gaan. Vóór 1 januari 1971 moesten alle baanvakken waarop met een snelheid van meer dan 100 km/h mocht worden gereden, van ATB voorzien zijn. De waarschuwende woorden van de SOR en de sombere verwachtingen van het DG bleken vervolgens geheel uit te komen. De invoering werd in de tweede helft van de jaren zestig vertraagd door technische problemen, onderschatting van de problematiek, mislukte experimenten, gebrek aan voldoende geschoold personeel en de verslechterde financiële positie van NS. In 1969 moest NS tegenover de staatssecretaris van Verkeer en Waterstaat bekennen dat het achteraf beter was geweest een relatief goedkoop en op korte termijn aan te brengen systeem te kiezen.
In 1970 was de ATB pas op zo'n 100 km ingevoerd. De overheid speelde in die tijd met de gedachte om alsnog over te stappen op Indusi. Het "point of no return" was echter al gepasseerd. Er was in 1970 al zo'n 70 miljoen in het systeem geïnvesteerd. Invoering van Indusi zou er toe leiden dat machinisten met twee verschillende systemen werden geconfronteerd. Ten derde was de staf van het Seinwezen toch gaande weg met het systeem vertrouwd geraakt.
En gelukkig begon men de problemen toch zo langzamerhand onder de knie te krijgen. Tot 1973 werd de ATB alleen gebruikt als cabinesignalering, waarbij de machinist moest reageren zonder dat de apparatuur ingreep. Pas toen was er ATB aangebracht op zoveel baanvakken en in zoveel materieel en was ook het systeem zover beproefd en betrouwbaar dat tot invoering van de remdwang kon worden overgegaan. Aanleg van ATB betekende niet alleen het geschikt maken van baanvakken, maar ook het geschikt maken van materieel. Daarbij lag het niet zo voor de hand om oudere en binnen een afzienbaar aantal jaren af te voeren materieelseries nog van ATB te voorzien."
Uit: "Spoorwegongevallen in Nederland 1839 – 1993", door R.T. Jongerius, uitg. Schuyt & Co., Haarlem 1993
2 ATB eerste generatie (ATBEG)
2.1 Inleiding
In het navolgende hoofdstuk wordt ingegaan op de werking van het ATB systeem dat in de jaren '60 is gekozen en functioneel tot op heden vrijwel ongewijzigd is gebleven. Hieronder worden de sterke en zwakke punten van dit systeem beschreven. Dit systeem wordt thans ATB Eerste Generatie (ATBEG) genoemd.
2.2 De positie van het ATB-systeem
Alvorens in te gaan op de functionaliteit van ATB, wordt eerst de algemene opbouw van spoorwegbeveiligingssystemen beschreven en de rol van het ATB-systeem in deze. De beveiligingsinstallaties voor het treinverkeer hebben tot taak het voorkomen van gevaar door:
- het voorkomen van ontsporingen in wissels en dergelijke;
- het voorkomen van aanrijdingen tussen treinen onderling, door conflicterende treinbewegingen uit te sluiten;
- het voorkomen van aanrijdingen met andere vormen van verkeer en/of werkenden.
2.3 Globale opbouw
Basisbouwsteen van de beveiliging vormt het treindetectie-systeem. Het heeft tot taak het vaststellen of een spoorgedeelte vrij, dat wil zeggen onbezet, is. De informatie over het al dan niet onbezet zijn van spoorgedeelten dient als basis voor de emplacements- en baanvakbeveiliging. Tevens wordt op basis daarvan de aankondiging voor overwegbeveiligingsinstallaties afgeleid, dat wil zeggen de overweg geactiveerd bij nadering van een trein.
Met de emplacements-beveiligingsinstallaties worden rijwegen ingesteld van spoor x naar spoor y. Ze worden meestal centraal bediend, op kleinere emplacementen vaak door middel van een afstand stuursysteem. Gecontroleerd wordt het intact zijn van de rijweg, het onbezet zijn van de spoorgedeelten waarvan gebruik gemaakt wordt en het uitgesloten zijn van conflicterende treinbewegingen.
De baanvakbeveiligingen, de blokstelsels, dienen om een stuk spoor tussen twee emplacementen te verdelen in blokken, waarin zich slechts één trein tegelijk mag bevinden. De blokstelsels werken in principe volledig automatisch. In het in Nederland in gebruik zijnde seinstelsel geeft een sein informatie over het al dan niet veilig berijdbaar zijn van het spoorgedeelte waartoe het toegang geeft en de snelheid waarmee dit sein of het daarop volgende sein gepasseerd mag worden. Een (veilig) sein geeft toegang tot een rijweg of blok als aan de veiligheidsvoorwaarden voldaan is en geeft dan tevens een snelheidsopdracht aan de machinist.
Tenslotte is er het ATB-systeem. Dit systeem herhaalt de opdrachten van de vaste seinen langs de baan in de cabine en controleert of de machinist adequaat reageert door het inzetten van een remming.
In Figuur 1 is de beschreven opbouw schematisch weergegeven.
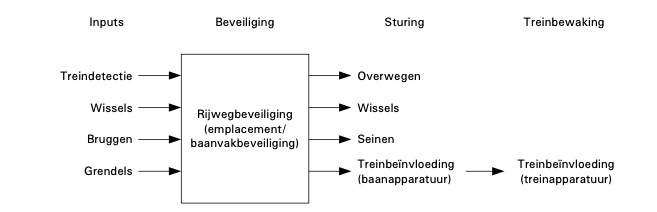
Opbouw treinbeveiliging
2.4 Treinbeïnvloeding (baanapparatuur)
In Figuur 1 is onderscheid gemaakt tussen een baandeel en een treindeel van de treinbeïnvloeding (ATB). De baanapparatuur verzamelt informatie over de infrastructuur en leidt daaruit een snelheidsopdracht of snelheidsprofiel voor de trein af. De treinapparatuur zal op basis van deze informatie bewaken of aan deze opdracht voldaan wordt, in die zin dat gecontroleerd wordt dat toegelaten snelheden niet overschreden worden. Voor de overdracht van baan naar trein zijn er diverse mogelijkheden.
2.5 Eisen
De beveiligingssystemen hebben veiligheidsverantwoording. Er worden dus hoge eisen aan gesteld. Op zich is NS daarin niet uniek, ook in de procesindustrie, in de lucht- en ruimtevaart komen dergelijke systemen voor. Spoorwegen zijn wellicht wel uniek in het feit dat al sinds lange tijd technische systemen zorg dragen voor de beveiliging en dat daarmee al een hoge graad van veiligheid bereikt is. Er worden daardoor ook zeer hoge eisen gesteld aan de te bewijzen veiligheid van nieuwe technologieën. In de spoorwegbeveiliging heet een systeem veilig (fail-safe) als gegarandeerd is dat door een denkbaar defect nooit een minder beperkende toestand kan ontstaan, dan op grond van de actuele toestand in de ongestoorde situatie het geval zou zijn geweest. Een geel sein mag bijvoorbeeld als gevolg van een storing wel rood worden, maar nooit groen.
Een spoorwegbedrijf kan gelukkig vrij simpel definiëren wat de veilige procestoestand in het geval van een defect moet zijn, namelijk de seinen op rood, de treinen stilstaand en de overwegen dicht. Dit is, althans voor even, een veilige bedrijfstoestand. Het spreekt daarnaast vanzelf dat ook aan de beschikbaarheid hoge eisen gesteld worden, omdat de zojuist beschreven toestand wel veilig is, maar niet veel bijdraagt aan de bedrijfsdoelstelling, namelijk het vervoeren van personen en goederen. Omdat (dus) bij een storing in de beveiliging toch gepoogd zal worden de treindienst voort te zetten, op basis van regelingen en noodprocedures, waarbij juist nieuwe risico's door bijvoorbeeld misverstanden kunnen ontstaan, zal duidelijk zijn dat ook de beschikbaarheid van beveiligingssystemen een belangrijke factor in het totale veiligheidsniveau is.
Bij het introduceren van een nieuw systeem voor de beveiliging moet een bewijs van veiligheid worden geleverd. Hoe dat (conform CENELEC-normen) geschiedt, valt buiten het kader van dit rapport. Hier volstaan we met de mededeling dat hiermee veel tijd en geld gemoeid is. De noodzaak van het moeten kunnen leveren van een bewijs van veiligheid leidt ook tot zeer specifieke ontwerpmethoden en voorschriften. Het leidt er ook toe dat innovaties niet zonder een directe opdrachtgever ontstaan (zoals dat bijvoorbeeld in de autobranche wel vanzelf plaatsvindt) en nieuwe technieken zeer geleidelijk ingang vinden.
3 Wat is ATB?
In beginsel geven de seinen langs de banen opdrachten op basis waarvan de machinist bepaalt hoe hard zijn trein mag rijden. ATB herhaalt de informatie van de vaste seinen in de cabine en controleert of de machinist daarop juist reageert. Doet hij of zij dat niet, dan bedient de ATB de noodrem en wordt de trein tot stilstand gebracht. ATB is de laatste schakel in de beveiligingsketen. Het systeem wordt wel eens omschreven als de parachute van of het vangnet onder de machinist.
In Nederland wordt hoofdzakelijk gebruik gemaakt van een ATB-systeem waarbij ononderbroken informatie vanuit het beveiligingssysteem wordt toegevoerd aan de trein. Dit systeem is bekend onder de naam ATB Eerste Generatie (ATBEG). Als transportmedium voor de informatie dienen de spoorstaven of langs de spoorstaven gelegde kabels. Deze informatie betreft de toegelaten snelheid op dat moment en wordt afgeleid van de seingeving. De trein neemt de informatie op via aan de voorzijde van de trein gemonteerde opneemspoelen. In de trein bevindt zich apparatuur die de gegeven code verwerkt en toetst aan de werkelijke snelheid van de trein. De verwerkte informatie wordt aan de machinist kenbaar gemaakt middels optische- en geluidssignalen, de zgn. cabinesignalering. Bij overschrijding van de toegelaten snelheid geeft de ATBEG treinapparatuur een remopdracht aan de machinist. Bij niet of onvoldoende reageren van de machinist op de remopdracht initieert ATBEG een snelremming. Hoewel de lichtseinen langs de baan toegelaten snelheden kunnen aangeven in stappen van 10 km/h is de ATBEG informatie beperkt tot een kleiner aantal snelheidstrappen vanwege het beperkt aantal beschikbare codes. Destijds is beslist, vanwege de hoge kosten, het aantal trappen beperkt te houden en ook geen code in te voeren voor de maximale snelheid van 40 km/h (stationsemplacementen).
Dit betekent dat in de huidige ATBEG met codes werkt voor de maximale snelheden van 60, 80, 130 en 140 km/h. Dit zijn ook de meest gebruikte snelheidstrappen in relatie tot de snelheidsbeperkingen bij wissels en de maximale toegelaten snelheden op het NS- spoorwegnet.
Geen code betekent een maximumsnelheid van 40 km/h (fail-safe). Dit geldt ook voor de situatie dat de trein een stoptonend sein nadert. ATBEG kan niet voorkomen dat een trein ten onrechte voorbij een stoptonend sein rijdt. Voor een toegelaten snelheid tussen de ATBEG snelheidstrappen wordt de eerstvolgende hogere ATBEG-snelheidstrap gebruikt, tenzij dit ontoelaatbare veiligheidsrisico's of overmatige slijtage aan de bovenbouw tot gevolg heeft. In die gevallen wordt de naastgelegen lagere snelheidstrap gebruikt.
Beperkingen in de snelheid van een trein die niet voortkomen uit de infra, maar bijvoorbeeld uit de materieeleigenschappen, worden niet door ATBEG ondersteund. Zo laat ATBEG toe dat een goederentrein die maximaal 80 km/h mag rijden wordt bewaakt op 140 km/h als de baanvaksnelheid 140 km/h is.
Concluderend: ATBEG is vooral een systeem voor beveiliging boven de 40 km/h grens, de primaire verantwoordelijkheid daarbij overlatend aan de machinist die de opdrachten van de seinen langs de baan op moet volgen. De cabinesignalering fungeert hierbij als ondersteuning.
3.1 Technische eigenschappen
De overdracht van informatie van baan- naar treinapparatuur is afhankelijk van de goede elektrische geleiding tussen rail en wiel (treindetectie). In de jaren '80 bleek dat modern dieselmaterieel met goede loopeigenschappen niet onder alle omstandigheden de juiste werking teweegbracht. Hierdoor kon de overdracht van de informatie haperen, waardoor de treinapparatuur het signaal als "geen code" beschouwt. De verslechterende detectie- eigenschappen vormen overigens ook los van de ATB-code doorgifte op zichzelf al een toenemend probleem voor het goed functioneren van de beveiligingssystemen. Ook op geëlektrificeerde baanvakken zijn verstoringen van het ATB baansignaal mogelijk. De tractie-installaties van het materieel produceren stromen die in dezelfde frequentieband zitten als de signalen van de ATB. Hierdoor kan het baansignaal verminkt worden. Dit heeft meestal tot gevolg dat de treinapparatuur het baansignaal beschouwt als "geen code".
3.2 Evaluatie
De invoering van ATBEG op het Nederlandse spoorwegnet heeft de veiligheid sterk doen toenemen. Alle treinbotsingen met fataal letsel gedurende de laatste 20[1] jaar gebeurden op baanvakken die niet uitgerust waren met ATB, en zouden waarschijnlijk niet plaatsgevonden hebben als daar ATB operationeel zou zijn geweest, getuige ook de aanbevelingen gedaan door de Spoorweg Ongevallen Raad (SOR) als resultaat van haar onderzoeken. Tot op de dag van vandaag is het Nederlandse spoorwegnet nog niet geheel van ATB voorzien. Op baanvakken mèt ATB hebben zich wel aanrijdingen tussen treinen voorgedaan, maar daarbij vielen geen doden maar wel (soms zwaar) gewonden.
Zoals vermeld kan ATBEG niet geheel voorkomen dat een machinist een stoptonend sein negeert. De voornaamste redenen hiervoor zijn het ontbreken van een snelheidsbewaking onder de snelheid van 40 km/h en het ontbreken van remcurvebewaking.
De afwezigheid van remcurvebewaking kan ook bij een remopdracht naar een snelheid ongelijk aan nul km/h tot ongewenste situaties leiden. Daar er geen vaste (alleen een minimale) afstand wordt gehanteerd tussen twee seinen en deze afstand vaak groter is dan de benodigd voor de maximale remweg van een trein, controleert de ATBEG- treinapparatuur alleen of er op een bepaald minimum niveau wordt geremd. Als criterium voor voldoende reageren van de machinist geldt het plaatsen van de remkraan in de "eerst gemarkeerde positie".
De machinist laat hierdoor zien dat hij "handelingsbekwaam" is; d.w.z. dat hij het sein heeft waargenomen en zich bewust is van de opgelegde snelheidsverlaging. De door de ATB minimaal gevraagde vertraging is echter geen garantie dat de trein ook daadwerkelijk tijdig zal voldoen aan de door de seingeving opgelegde opdracht. De filosofie achter het systeem is dat de machinist verantwoordelijk is voor de juiste remming en alleen door ATBEG wordt gecontroleerd op het opvolgen van de seinen.
Al hoewel het mogelijk zou zijn de remvertraging in relatie tot de maximaal toegelaten snelheid vast te stellen en deze remvertraging te laten bewaken door de ATBEG treinapparatuur, zou dit in veel gevallen resulteren tot afremmen naar de verlangde lagere snelheid lang voordat het eerstvolgende sein wordt bereikt.
Bij de introductie van ATBEG in de 60-er jaren is hier wel mee geëxperimenteerd. Men had hiertoe drie trein categorieën gedefinieerd. Elk van deze categorieën kreeg een ander remcriterium: Hoog, Midden of Laag. Het bleek echter onmogelijk om een zodanige keuze te maken dat èn de veiligheid volledig was geborgd èn de beschikbaarheid niet onacceptabel werd verlaagd. Immers, hoe groter de vertraging is die door de ATB wordt afgedwongen, des te eerder zal de lagere snelheid worden bereikt (zelfs al voor het punt waar dit echt nodig is) en des te meer baanvakcapaciteit gaat hiermee verloren.
Daarom werd aanvaard dat de ATB alleen zou controleren of er tot een bepaalde, minimale, stand geremd werd bij alle snelheidsniveaus en niet of de remactie voldoende was voor het betrokken toegelaten snelheidsniveau.
Beide onvolkomenheden in het systeem, het ontbreken van de snelheidsbewaking onder 40 km/h en de afwezigheid van een remcurvebewakingssysteem, zijn destijds weloverwogen geaccepteerd als zijnde een compromis tussen veiligheid aan de ene kant en kosten en een flexibele werking aan de andere.
3.3 Overweging
ATBEG heeft de veiligheid sterk verbeterd, maar laat de verantwoordelijkheid toch voor een deel bij de machinist liggen. Hoewel voor deze benadering bij de invoering bewust is gekozen, hebben de omstandigheden zich sindsdien gewijzigd. Voor machinisten in die dagen vormde de ATB een toegevoegd beveiligingssysteem waar nogal sceptisch tegenaan gekeken werd. Het grootste deel van de tijd reden ze ook op baanvakken waar geen ATB operationeel was.
Geleidelijk leerden ze de voordelen van het nieuwe systeem te waarderen, vooral onder slechte weersomstandigheden, maar zij waren (en zijn) zich ook bewust van hun eigen verantwoordelijkheid. Veel hedendaagse machinisten zijn opgegroeid met het ATB-systeem en rijden zelden op baanvakken zonder ATB. Van gevallen dat een machinist eens een keer zonder ATB moet rijden is bekend dat de machinisten dit als erg onplezierig en onveilig ervaren.
Een voorkomend euvel bij het door een stoptonend sein rijden blijkt het foutief inschatten van de beschikbare remweg, waardoor ondanks een voor de ATB-installatie correcte reactie door de machinist toch niet voorkomen kan wordt dat het sein voorbij wordt gereden.
3.4 Samengevat
De voor- en nadelen van ATBEG kunnen als volgt worden omschreven:
Voordelen:
- Continue bewaking van de actuele treinsnelheid
- Continue informatie over de maximaal toegestane snelheid
- Controle op bediening van de rem door de machinist
- Remingreep indien machinist de rem niet (tijdig) bedient.
Nadelen:
- Geen bewaking in het snelheidsgebied tot 40 km/h
- Voorkomt het rijden langs stoptonend sein niet
- Overdracht van informatie afhankelijk van de goede werking van het wiel-rail-contact (detectie)
- Geen remcurvebewaking
4 Technische ontwikkeling ATBEG
De ATBEG baanapparatuur heeft gedurende de jaren nooit een technische ontwikkeling doorgemaakt; de apparatuur is identiek aan die in de jaren '60 is geïntroduceerd. Wel zijn op aanpassingen en optimalisaties van de spoorstroomloopschakelingen etc. gedaan.
4.1 Fase 2
De treinapparatuur heeft sinds de introductie wel een technische doorontwikkeling ondergaan. Het ontwerp van de oudste versie, treinapparatuur ATB fase 2, dateert uit de beginjaren '60 en was voornamelijk gebaseerd op relaistechniek. Vandaag de dag zijn geen materieeleenheden met een ATB fase 2 kast meer in dienstin dienst.
4.2 Fase 3
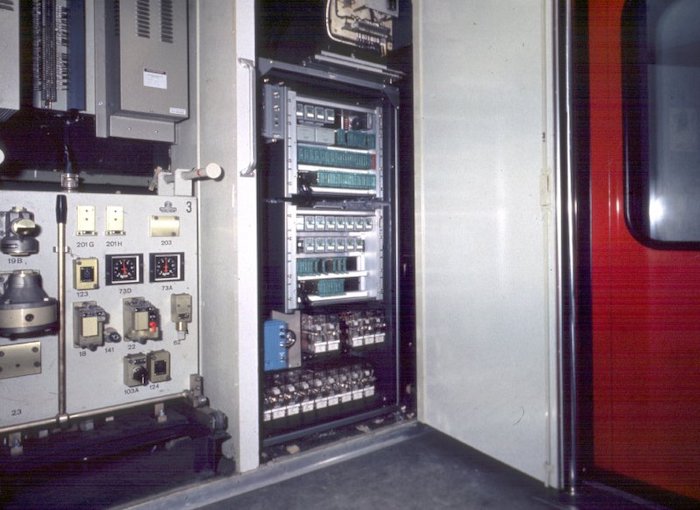
ATB Fase 3 kast ingebouwd, balkon Mat 64
In het begin van de jaren '70 is de ATB fase 3 treinapparatuur geïntroduceerd. Hierbij is voornamelijk gebruik gemaakt van elektronica (discrete componenten: schakelingen die uitsluitend met hardware zijn gebouwd). Er waren in 2001 circa 500 kasten in dienst. Van de ATB fase 3 treinapparatuur bestaan verschillende varianten: voor treinstellen en locomotieven. Beide zijn onderling niet uitwisselbaar. ATB fase 3 wordt sinds eind '70/begin '80 niet meer nieuw geleverd. De fabrikant van de ATB fase 3 treinapparatuur (GRS) had te kennen gegeven dat hij de kennis van deze apparatuur niet meer in stand te houden. NS heeft toen geaccepteerd dat de kennis die nodig is om nog aanpassingen aan het systeem te kunnen verrichten, zou verdwijnen. De kennis voor instandhouding van ATB fase 3 was voldoende geborgd in de NS-organisatie.
Vooraanzicht ATB fase 3 treinapparatuur.
4.3 Fase 4
Midden jaren '80 is de ATB fase 4 treinapparatuur ontwikkeld waarbij de microprocessor zijn intrede heeft gedaan. Hierbij is getracht om op basis van de nieuwste technieken die beschikbaar waren, oplossingen te vinden voor de technische problemen uit het verleden en faciliteiten te scheppen voor toekomstig te stellen eisen.
Op basis van een open uitvraag is een aantal fabrikanten verzocht een aanbieding voor de ontwikkeling te doen. Uiteindelijk heeft de Belgische firma ACEC (nu: Alstom Belgium) de opdracht gekregen. Eis bij de ontwikkeling was dat de treinapparatuur uitbreidbaar moest zijn voor de toekomstige ontwikkelingen (ATBNG). Vanaf 1989 is ATB fase 4 ingebouwd. Het idee was toen dat geleidelijk alle fase 2 en fase 3 apparatuur zou worden vervangen door fase 4, waarna het pad naar ATBNG geëffend zou zijn. Mede als gevolg van de ontwikkeling van ERTMS/ETCS zijn hiervoor nooit concrete invoeringsplannen gemaakt.
5 ATB Nieuwe Generatie (ATBNG)

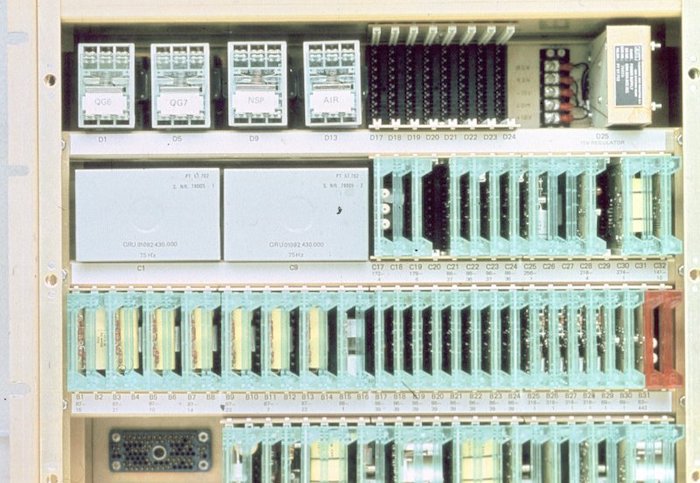
ACEC ATBNG treinapparatuur foto Mark Hauer
In de jaren '80 is men in Europa gaan nadenken over een volgende generatie treinbeïnvloedingssystemen. Enerzijds bood de techniek toen meer mogelijkheden dan voordien, anderzijds groeide het besef dat de functionaliteit van de bestaande systemen in de toekomst tekort zou gaan schieten.
Ook NS heeft op dat moment een studie gestart. Onder de naam "Tweede Generatie ATB" heeft men onderzocht wat de eisen zouden moeten zijn aan het ATB-systeem van de toekomst. Uiteindelijk heeft men de volgende functionele eisen gedefinieerd:
· train trip functie (ingrijpen bij passage stoptonend sein (STS));
· snelheidsbewaking ook in het gebied van 0 tot 40 km/h;
· bewaking van de maximale snelheid, afgestemd op het treintype;
· meer snelheidstrappen;
· volledige remcurvebewaking;
· volledige cabinesignalering;
· bewaking van tijdelijke snelheidsbeperkingen;
· bewaking van bijzondere gevaarpunten;
· voorbereiding op toekomstige beheersfuncties.
Deze eisen werden ingegeven doordat vanwege het toenemend treinverkeer en stand de van de techniek de (node) geaccepteerde tekortkomingen van ATBEG niet langer acceptabel geacht (zie ook uitspraken Spoorweg Ongevallen Raad). Bovendien had de Rijksoverheid te kennen gegeven dat in de nabije toekomst overal in Nederland waar harder dan 40 km/h èn op seinen wordt gereden, ATB moet zijn aangebracht. Aangezien de werking van ATBEG niet overal gegarandeerd is vanwege de detectie eigenschappen van bepaalde types materieel, moest gezocht worden naar andere oplossingen.
Daarom zijn naast de functionele eisen de volgende technische eisen gedefinieerd:
· overdracht van informatie onafhankelijk van wiel-rail contact;
· bestand tegen 25kV/50 Hz tractie.
Overige eisen:
· voertuigapparatuur compatibel met ATBEG;
· ondersteuning van alle functies van ATBEG;
· op basis van upgrade van ATBEG fase 4 treinapparatuur.
De ontwikkeling zou gefaseerd plaats gaan vinden waarbij de volgende stappen te onderscheiden waren:
· ontwikkeling van een ATB-systeem met uitgebreidere functionaliteit;
· migratie naar een ATB-systeem aangevuld met beheersfunctionaliteiten (Beter Benutten) door toevoeging van beheersinformatie;
· toepassen van radio voor baan-trein communicatie met mogelijkheden voor autolocalisatie.
Een probleemloze overstap van ATBEG naar ATBNG werd verzekerd door eerst al het materieel te voorzien van ATBNG en vooralsnog de ATBEG baanapparatuur te handhaven. Nadat het hele materieelpark met ATBNG zou zijn uitgerust zou invoering van ATBNG in de baan gestart kunnen worden. Ook zou het mogelijk zijn om, vooruitlopend op volledige inbouw van ATBNG, specifieke risicopunten alvast te voorzien van een stoptonend-sein- bewaking, die dan alleen zou werken bij materieel dat ook van ATBNG is voorzien. Zoals vermeld zijn deze invoeringsscenario's nooit geconcretiseerd.
Tijdens de ontwikkeling van stap 1 startte ook het Europese project ERTMS/ETCS (European Railway Traffic Management System / European Train Control System). Dit project beoogde een standaard neer te zetten voor een Europees treinbeïnvloedingssysteem. In concept vertoont dit systeem grote overeenkomsten met de plannen die NS had met ATBNG. Om die reden heeft de Hoofddirectie tijdens de ontwikkeling van stap 1 in overleg met het Ministerie van V&W besloten om de stappen 2 en 3 niet te gaan zetten en zich na stap 1 bij ERTMS/ETCS aan te sluiten.
Omdat het Ministerie V&W in 1993 de uitspraak deed dat ATB per 1-1-2000 verplicht is voor alle baanvakken met een snelheid groter dan 40 km/h én ATBEG op veel van deze baanvakken vanwege de inzet van modern reizigersmaterieel (vanwege de ontoereikende detectie-eigenschappen) niet kan worden toegepast, is prioriteit gegeven aan de ATBNG ontwikkeling voor modern diesel-reizigersmaterieel.
De ontwikkeling en beproeving van ATBNG leidde in 1996 tot een eerste toepassing op het baanvak Zevenaar-Winterswijk, samen met het uitrusten van 53 DM'90 treinstellen. Tijdens de ontwikkeling bleek dat het niet mogelijk was om tijdig voor de geplande indienststelling ATBNG voor zowel treinstellen als locomotieven volledig te ontwikkelen. Daarom is toen besloten om alle inspanningen te richten op de toepassing in treinstellen omdat de eerste toepassing voor locomotieven nog even op zich liet wachten. De invulling van de functionaliteit voor locomotieven is middels een project alsnog in 1997 gestart en is inmiddels gereed.
Bij de aanleg van ATBNG op een aantal dieselbaanvakken zijn deze tegelijk voorzien van een ander detectiesysteem, dat niet meer afhankelijk is het trein-wiel-contact.
Het Ministerie van V&W heeft het ATBNG-project laten beoordelen (assessment) door de onafhankelijke deskundige organisatie TÜV Rheinland. Deze concludeerden dat NS voor de beoogde toepassing een goed en veilig systeem ontwikkeld hebben. Wel werd door de TÜV Rheinland aanbevolen om ATBNG uit te breiden met data-registratie (blackbox). Het Ministerie van V&W heeft deze aanbeveling overgenomen en vervolgens Railinfrabeheer verzocht data-registratie te realiseren. Ook werd bij deze gelegenheid door het Ministerie van V&W aan Railinfrabeheer gevraagd een "reverse" STM te ontwikkelen (RVI/S-72249 d.d. 17.10.1997).
Na enkele jaren ervaring opgedaan te hebben met ATBNG is in 1998 het systeem door onder andere de gebruikers (vervoerders en instandhouders) geëvalueerd. Hierbij is een aantal verbeteringen voorgesteld, enkele voor de veiligheid en de overige voor de functionaliteit van ATBNG. Een nieuwe software release van de treinapparatuur wordt nodig geacht om tot een correcte afronding van het product ATBNG te komen.
6 PBA, PBKA en ICE3
Er reden in 2001 in Nederland twee typen Thalys treinen: de PBA en PBKA. PBA staat voor Parijs-Brussel-Amsterdam. PBKA staat voor Parijs-Brussel-Keulen-Amsterdam. De namen van de steden geven aan voor welke landen de trein geschikt is om te rijden. De PBA is het eerste ontstaan. In feite is dit een normale TGV die een andere kleur heeft gekregen. Aangezien die trein in Frankrijk, België en Nederland ging rijden, moesten er in die trein alle treinbeïnvloedingssystemen van die landen aanwezig zijn. Voor Nederland is toen de keuze gemaakt dat ATB fase 4 zou worden geïmplementeerd; de ontwikkeling van ATBNG kwam hiervoor te laat. De implementatie van ATB fase 4 in de PBA is gestart als een implementatieproject. Tijdens de eerste beproevingen bleek dat er technische problemen optraden; de opneemspoelen van de ATB installatie werden beïnvloed door stromen uit de tractie-installatie. Dit heeft geleid tot een specifieke aanpassing in de ATB apparatuur van dit treintype.
Hierbij bleek voor het eerst hoe lastig het was om een aanpassing in een dergelijke installatie door te voeren in de gewijzigde organisatie. De trein werd namelijk gebouwd door een Frans bedrijf, onder leiding van een projectleider van de SNCF. De Nederlandse vervoerder (HST VEM) werd in het project vertegenwoordigd door Nedtrain. Deze vertegenwoordiger moest ervoor zorgen dat de eisen aan onder andere de ATB apparatuur werden verwezenlijkt, die aan hem werden gesteld door Railinfrabeheer en Railned. Degene die de wijzigingen moest doorvoeren (Alstom) had echter alleen een contract met de bouwer van de trein. Bijkomend probleem was dat aan de landsgrenzen het juiste treinbeïnvloedingssysteem geselecteerd en gezekerd moet worden (selecteren is een kwestie van een knop voor de machinist, maar er moet ook worden zeker gesteld dat het niet wordt vergeten). Al sinds jaar en dag wordt dat voor het Benelux-materieel op basis van de bovenleidingspanning gedaan. Deze oplossing bleek voor de PBA niet mogelijk omdat dit materieel ook in Frankrijk onder een 1500V bovenleiding moest kunnen rijden (in Frankrijk zijn nog vele spoorlijnen voorzien van 1500V en de TGV moet overal inzetbaar zijn). Een en ander heeft geleid tot veel discussies, moeizame besluitvorming en uiteindelijk oplossingen die de schoonheidsprijs niet verdienen.
Het PBKA materieel was een nieuw ontwikkeld materieel type. Deze trein zou worden voorzien van ATBNG treinapparatuur. Ten behoeve van het rijden in België zou een TBL installatie (Belgisch treinbeïnvloedingssysteem, genaamd Transmission Balise Locomotive) worden ingebouwd. Aangezien Alstom Charleroi zowel leverancier is van TBL als ATBNG stelde zij voor om deze twee apparaten te integreren. Het nieuwe systeem kreeg de naam ATBL (een samentrekking van ATB en TBL). Dit zou ruimtebesparing in het materieel opleveren. Het voordeel voor Alstom zou zijn dat ze hiermee een krachtig systeem op de markt zouden zetten waarmee zowel in België als in Nederland gereden kon worden. Tevens was toen de gedachte van Alstom dat men hiermee een hardware platform voor ERTMS in huis zou hebben. Zowel het ATBNG als TBL zijn treinbeïnvloedingssystemen die gebruik maken van een overdrachtssysteem tussen baan en trein op basis van digitaal gecodeerde berichten afkomstig van bakens.
Deze systemen bieden hiermee ook de mogelijkheid om expliciet vanuit de infrastructuur de opdracht aan de treinapparatuur te geven om over te schakelen van het ene treinbeïnvloedingssysteem naar het andere. Hierdoor vervallen de nadelen die het handmatig omschakelen kent. Teneinde het omschakelen tussen de systemen van de verschillende landen goed te regelen, heeft een werkgroep zich beziggehouden met de specificatie van deze functionaliteit: de transitie. Deze werkgroep bestond uit vertegenwoordigers van NS, NMBS en DB. De werkzaamheden hebben geleid tot een Additional Functional Requirement Specification (AFRS) waarin functioneel beschreven is hoe de transitie dient te verlopen. Dit is inclusief de foutafhandeling voor de gevallen dat er onverhoopt berichten uit de infra niet door de trein zouden worden ontvangen. In het kort komt het erop neer dat een transitie alleen tussen "intelligente" treinbeïnvloedingssystemen gedacht werd; immers alleen deze systemen zijn "slim" genoeg om het begin of eind van hun toepassingsgebied te kunnen onderscheiden. Binnen het PBKA project heeft Nedtrain de begeleiding van de ontwikkeling van ATBL op zich genomen. Afgesproken was dat Nedtrain aan Railinfrabeheer het nodige bewijs zou leveren voor vrijgave van het systeem. Lopende het project ontstonden met Nedtrain soortgelijke discussies als bij het PBA project, overigens met dezelfde resultaten. Gevolg is dat ook de ATBL installaties uit de PBKA alleen is toegelaten voor wat betreft de ATBEG functies. Dit betekent dat de PBKA (nog) niet is toegelaten op baanvakken die zijn voorzien van ATBNG baanapparatuur.
De nieuwste DB hogesnelheidstrein ICE3 die nu de verbinding van Amsterdam met Duitsland verzorgt, is ook uitgerust met een ATBL installatie. Als basis is de ATBL PBKA installatie genomen, die op enkele technische punten wordt aangepast zodat deze in de ICE3 past. Ook voor deze trein geldt dat de ATBL-installatie op dit moment alleen is toegelaten voor wat betreft de ATBEG functies.
Zowel voor PBKA als ICE3 geldt dat er nog een ontwikkeling nodig is om de rijdende overgangen tussen de diverse treinbeïnvloedingssystemen op een acceptabel niveau te brengen.
Na oplevering van ATBNG voor treinstellen is in 1997 op verzoek van het project Betuweroute de uitontwikkeling van ATBNG voor getrokken treinen gestart. Hiertoe is onder leiding van Railinfrabeheer een project gestart. Begonnen is met het opstellen van de functionele specificatie (FRS). Op basis van deze specificatie is offerte gevraagd aan Alstom Belgium.
Na inventarisatie bleek dat NS Cargo (nu: Railion Benelux) voor hun locomotieven een sterke voorkeur had voor het ATBL-platform. Aangezien deze apparatuur kleiner van afmeting is de ATBNG apparatuur zou dit de implementatie vergemakkelijken. In de offerte aanvraag aan Alstom is daarom vermeld dat de functionaliteit ook op het ATBL-platform geïmplementeerd zou moeten worden. Tijdens de ontwikkeling ontstonden er aan de kant van Alstom grotere problemen dan men op voorhand had verwacht. Het ATBL-platform bleek (te) sterk ontwikkeld te zijn op de omgeving van het PBKA-materieel. Belangrijke interfaces tussen de ATBL apparatuur en het materieel bestonden uit treinspecifieke bussystemen (dit zijn reeds in de oorspronkelijke trein aanwezige data-netwerken). De interface die nodig is om te kunnen communiceren met bestaand "normaal" materieel bestaat veelal uit het inlezen van spanningen en/of ophalen van potentiaal vrije (relais)contacten. Met name deze problematiek heeft geleid tot vertragingen in het project. Uiteindelijk kon medio 1998 het gewijzigde ATBNG systeem en het aangepaste ATBL- platform in de praktijk met succes worden beproefd.
Tijdens de start van deze ontwikkeling was het idee dat het ATBL-platform zodanig zou worden aangepast dat toepassing voor zowel het Nederlandse als het Belgische spoorwegnet mogelijk was. De Mens Machine Interface gooide echter roet in het eten. De NMBS heeft namelijk een andere filosofie t.a.v. het remcurvemodel. Op zich zou dat nog niet tot problemen hoeven te leiden. De treinapparatuur weet immers in welk land het zich bevindt en kan de bijbehorende curve kiezen. De afwijking zit in de parameters die de machinist moet invoeren en de representatie van de remcurve in de cabine. Dit zou kunnen leiden tot het (gedeeltelijk) dubbel in moeten voeren van de parameters bij aanvang van de rit. Ook hiervoor zou een oplossing kunnen worden bedacht, maar dat zou op dat moment een intensief overleg met de NMBS hebben betekend. Gezien de druk die toen op het project zat is hiervoor niet gekozen.
Het eindresultaat van de ontwikkeling was dan ook:
· het ATBNG hardware platform met de ATBNG functionaliteit (incl. ATBEG) voor zowel treinstellen als getrokken treinen;
· het ATBL hardware platform, geschikt voor "normaal" materieel, met de ATBNG functionaliteit (incl. ATBEG) voor zowel treinstellen als getrokken treinen.
Gezien het feit dat er functioneel niet echt meer sprake is van een ATBL-systeem is het laatstgenoemde omgedoopt tot: ATBL-NL. Het is overigens nog steeds mogelijk om ook de Belgische functionaliteit op het laatstgenoemde systeem te implementeren.
7 Treinbeïnvloeding en invoering 25kV
De invoering van 25kV in Nederland had ook gevolgen voor ATBEG, en omgekeerd. Van ATBEG treinapparatuur is bekend dat deze onvoldoende bestand is tegen de hoge 50Hz stromen in de spoorstaven die hierdoor teweeggebracht worden. De treinapparatuur kan de code in het spoor niet meer decoderen hetgeen resulteert in het selecteren van de meest restrictieve code: Vmax=40 km/h. Om deze reden kon er van ATBEG onder 25kV geen sprake zijn. Dit betekent direct dat er aan invoering van 25kV grootschalige materieelombouw is verbonden.
Op 1500V baanvakken die parallel lopen aan 25kV baanvakken vindt beïnvloeding via retourstromen plaats vanuit het 25kV spoor. Deze beïnvloeding is beperkt zodat er wel mogelijkheden zijn om ATBEG treinapparatuur geschikt te maken voor die baanvakken. De nodige ontwikkelingen daarvoor werden ter hand genomen.
[1] Noot: referentiedatum is 13-3-2001
Bronnen:
1. ATB problematiek Uiteenzetting - Samenhangen – Keuzes. A Wedzinga en J. van den Hout, Railned Spoorwegveiligheid, maart 2001
2. Spoorwegongevallen in Nederland 1839 – 1993", door R.T. Jongerius, uitg. Schuyt & Co., Haarlem 1993
Laatste aanpassing: 2 juni 2023